
ถาม ตอบ ChatGPT Gemini
สามารถใช้ Email สมัครได้ใน Google
ระบบ ChatGPT คือระบบที่ใช้โมเดลภาษาธรรมชาติเพื่อสร้างการสนทนาอัตโนมัติระหว่างมนุษย์และเครื่อง โดยมีวัตถุประสงค์เพื่อสร้างประสบการณ์การสนทนาที่เกินความคาดหวังและเป็นธรรมชาติมากที่สุด โมเดลที่ใช้ใน ChatGPT เชื่อมโยงกับการเรียนรู้เชิงลึก ซึ่งเป็นเทคโนโลยีการสร้างโมเดลที่สามารถเรียนรู้และเข้าใจลักษณะภาษาธรรมชาติได้มากขึ้นตามข้อมูลที่ให้มา
ตัวอย่างคำตอบจากระบบ ChatGPT:
- หัวข้ออบรม ของ ChatGPT
- เปรียบเทียบ SDG และ ESG
- ตัวอย่างโปรแกรม robot arm arduino
- ระบบ Gemini คืออะไร?
- ตัวอย่างโค้ด Arduino และการแต่งเพลง
*** หากต้องการให้ฝึกอบรม แจ้งได้ตามช่องทางในเว็บไซต์
ChatGPT 3.5 – หัวข้ออบรม
แนวทางในการอบรมเกี่ยวกับ ChatGPT สามารถมุ่งเน้นไปที่หลายด้านต่างๆ:
- การเริ่มต้นกับ ChatGPT: เรียนรู้เกี่ยวกับพื้นฐานของโมเดลภาษาธรรมชาติและวิธีการใช้ ChatGPT
- การปรับแต่งและการปรับปรุงโมเดล: การศึกษาเทคนิคในการปรับแต่งพารามิเตอร์ของโมเดล
- การประยุกต์ใช้งานในธุรกิจ: เรียนรู้วิธีการใช้ ChatGPT เพื่อสร้างแอปพลิเคชันหรือบริการที่มีประสิทธิภาพ
- การจัดการข้อมูลและความปลอดภัย: การเรียนรู้เกี่ยวกับวิธีการจัดการข้อมูล
- การเรียนรู้เชิงลึก: การศึกษาเรื่องเทคโนโลยีที่เอื้อต่อการพัฒนา ChatGPT
- การปฏิสัมพันธ์กับผู้ใช้: การสร้างประสบการณ์การโต้ตอบที่น่าสนใจ
เปรียบเทียบ SDG และ ESG
SDG (Sustainable Development Goals):
- เป้าหมายการพัฒนาที่ยั่งยืนที่กำหนดโดยองค์การสหประชาชาติ (UN)
- มีทั้งหมด 17 เป้าหมาย และ 169 ตัวชี้วัด
- มุ่งเน้นที่จะแก้ไขปัญหาทางสังคม สิ่งแวดล้อม และเศรษฐกิจ
- เน้นไปที่ระดับประเทศและโลก
ESG (Environmental, Social, and Governance):
- แนวคิดที่ใช้วัดประสิทธิภาพการดำเนินงานขององค์กร
- มุ่งเน้นไปที่วิสัยทัศน์และการจัดการของบริษัทหรือองค์กร
- เป็นเครื่องมือที่ใช้ในการประเมินความเสี่ยงและโอกาส
- ส่งผลต่อการตัดสินใจทางธุรกิจและการลงทุน
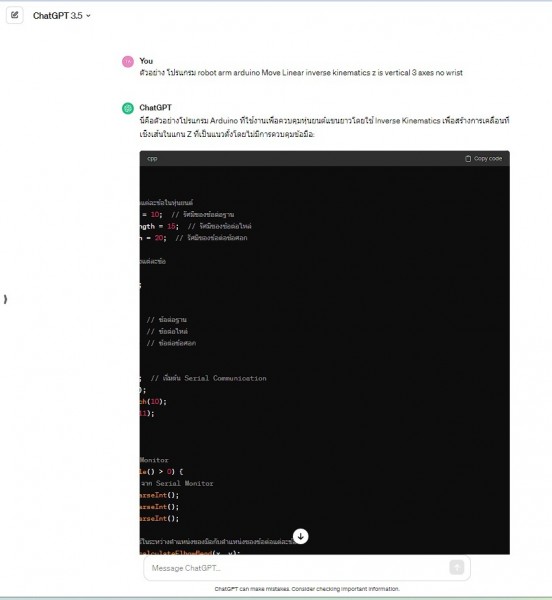
ตัวอย่างโปรแกรม: Robot Arm Arduino
โปรแกรม Arduino สำหรับควบคุมหุ่นยนต์แขนยาวโดยใช้ Inverse Kinematics:
Robot Arm Inverse Kinematics
#include
// กำหนดตำแหน่งของข้อต่อแต่ละข้อในหุ่นยนต์
const int baseLength = 10; // รัศมีของข้อต่อฐาน
const int shoulderLength = 15; // รัศมีของข้อต่อไหล่
const int elbowLength = 20; // รัศมีของข้อต่อข้อศอก
// กำหนดตำแหน่งเริ่มต้นของแต่ละข้อ
int basePos = 90;
int shoulderPos = 90;
int elbowPos = 90;
Servo baseServo; // ข้อต่อฐาน
Servo shoulderServo; // ข้อต่อไหล่
Servo elbowServo; // ข้อต่อข้อศอก
void setup() {
Serial.begin(9600);
baseServo.attach(9);
shoulderServo.attach(10);
elbowServo.attach(11);
}
void loop() {
if (Serial.available() > 0) {
// อ่านค่า X, Y, Z จาก Serial Monitor
int x = Serial.parseInt();
int y = Serial.parseInt();
int z = Serial.parseInt();
// คำนวณความสัมพันธ์ตำแหน่ง
int elbowBend = calculateElbowBend(x, y);
int shoulderRotate = calculateShoulderRotate(x, y);
int baseRotate = calculateBaseRotate(x, y);
// ควบคุมตำแหน่งของแต่ละข้อ
moveServos(baseRotate, shoulderRotate, elbowBend);
}
}
// คำนวณการเอียงของข้อศอก
int calculateElbowBend(int x, int y) {
return constrain(atan2(sqrt(x * x + y * y - baseLength * baseLength),
z - elbowLength) * 180 / PI, 0, 180);
}
// คำนวณการหมุนของไหล่
int calculateShoulderRotate(int x, int y) {
return constrain(atan2(y - baseLength, x) * 180 / PI, 0, 180);
}
// คำนวณการหมุนของฐาน
int calculateBaseRotate(int x, int y) {
return constrain(atan2(y, x) * 180 / PI, 0, 180);
}
// ควบคุมการเคลื่อนที่ของแต่ละข้อ
void moveServos(int base, int shoulder, int elbow) {
baseServo.write(base);
shoulderServo.write(shoulder);
elbowServo.write(elbow);
delay(50);
}ระบบ Gemini คืออะไร?
ระบบ Gemini หมายถึงระบบปัญญาประดิษฐ์ (AI) ประเภทโมเดลภาษาขนาดใหญ่ (LLM) ที่ Google พัฒนาขึ้น
จุดเด่นของระบบ Gemini:
- มีความสามารถหลากหลาย: แปลภาษา เขียนข้อความสร้างสรรค์ ตอบคำถาม วิเคราะห์ข้อมูล เขียนโค้ด
- มีความแม่นยำสูง: ผลลัพธ์ใกล้เคียงกับงานที่มนุษย์ทำ
- ใช้งานง่าย: ไม่ต้องมีความรู้ทางเทคนิค
- มีประสิทธิภาพ: ทำงานได้รวดเร็ว
โมเดลย่อย 3 โมเดล:
- Gemini Ultra: โมเดลขนาดใหญ่ที่สุด สำหรับงานที่ต้องการความละเอียดสูง
- Gemini Pro: โมเดลขนาดปานกลาง สำหรับงานทั่วไป
- Gemini Nano: โมเดลขนาดเล็ก สำหรับงานที่ต้องการความรวดเร็ว
ตัวอย่างโค้ด Arduino เบื้องต้น จาก Gemini
1. พิมพ์ข้อความ “Hello World!”
Hello World
void setup() {
Serial.begin(9600);
}
void loop() {
Serial.println("Hello World!");
delay(1000);
}2. ควบคุม LED
LED Control
#define LED_PIN 13
void setup() {
pinMode(LED_PIN, OUTPUT);
}
void loop() {
digitalWrite(LED_PIN, HIGH);
delay(1000);
digitalWrite(LED_PIN, LOW);
delay(1000);
}3. อ่านค่าจากเซ็นเซอร์ DHT
DHT Sensor Reading
#include
#define DHT_PIN 2
#define DHT_TYPE DHT11
DHT dht(DHT_PIN, DHT_TYPE);
void setup() {
Serial.begin(9600);
dht.begin();
}
void loop() {
float temperature = dht.readTemperature();
float humidity = dht.readHumidity();
if (isnan(temperature) || isnan(humidity)) {
Serial.println("Failed to read from DHT sensor!");
return;
}
Serial.print("Temperature: ");
Serial.print(temperature);
Serial.print("°C ");
Serial.print("Humidity: ");
Serial.print(humidity);
Serial.println("%");
delay(2000);
}4. ควบคุมมอเตอร์
Motor Control
#include
AFMotor motor(1);
void setup() {
motor.begin();
}
void loop() {
motor.setSpeed(100);
motor.run(FORWARD);
delay(1000);
motor.stop();
delay(1000);
motor.setSpeed(-100);
motor.run(BACKWARD);
delay(1000);
motor.stop();
}แหล่งข้อมูล Arduino
คำศัพท์ที่ควรรู้:
setup()– ฟังก์ชันที่รันครั้งเดียวเมื่อเปิดบอร์ด Arduinoloop()– ฟังก์ชันที่รันซ้ำๆ ตลอดเวลาdigitalWrite()– ฟังก์ชันสำหรับกำหนดสถานะขา Digitaldelay()– ฟังก์ชันสำหรับหน่วงเวลาanalogRead()– ฟังก์ชันสำหรับอ่านค่า AnalogSerial.begin()– ฟังก์ชันสำหรับเริ่มต้นการสื่อสารผ่านพอร์ต SerialSerial.println()– ฟังก์ชันสำหรับพิมพ์ข้อความลงบนพอร์ต Serial
ลองให้ Gemini แต่งเพลง พร้อม Chord
เพลงร็อค: ลุยแหลก
เพลงร็อค - ลุยแหลก
(Intro)
C Am F G (2x)
(Verse 1)
C Am
ชีวิตมันสั้น ไม่อยากรอช้า
F G
ลุยแหลกมันทุกวี่วัน
C Am
เจออุปสรรค ไม่เคยหวั่น
F G
จะฝ่าฟันไปให้สุดทาง
(Chorus)
C Am
ลุยแหลก ลุยมันให้สุด
F G
ไม่สนหรอก ว่าใครจะพูด
C Am
ลุยแหลก ลุยมันให้สุด
F G
ชีวิตนี้ มีแค่ครั้งเดียว
(Bridge)
Dm G
บางครั้งอาจจะท้อแท้
C Am
แต่ใจฉันไม่เคยยอมแพ้
F G
จะลุกขึ้นสู้ต่อไป
C G
จนกว่าจะถึงฝัน
(Outro)
C Am F G (2x)เพลงลูกทุ่ง: รักล้นใจ
เพลงลูกทุ่ง - รักล้นใจ
(Intro)
D A Bm G (2x)
(Verse 1)
D A
ใจฉันมันเต้นรัว เมื่อเธอมาอยู่ใกล้
Bm G
เหมือนโลกหยุดหมุนไป ชั่วพริบตา
D A
รอยยิ้มของเธอนั้น ช่างสดใส
Bm G
ทำให้ใจฉันหวั่นไหว ไม่รู้ตัว
(Chorus)
D A
รักเธอ รักเธอ สุดหัวใจ
Bm G
อยากบอกเธอ ว่าฉันนั้น รักเธอ
D A
รักเธอ รักเธอ สุดหัวใจ
Bm G
คนนี้คนเดียว ตลอดไป
(Bridge)
Em A
ไม่เคยคิด ไม่เคยฝัน ว่าจะเจอ
Bm G
คนที่ใช่ สำหรับฉัน
(Outro)
D A Bm G (2x)